
What is Xavion?
Xavion is both a glass cockpit and a copilot for your real-world airplane.
Running on your iPad or iPhone, it gives you synthetic vision, GPS navigation, instrument backups, and ADS-B weather.
It isn’t just an EFIS, though. Like any good copilot, it’s always looking out for you. It can provide weight & balance checks, and estimate fuel burn and time to your destination at various altitudes.
Most importantly, Xavion can learn the glide characteristics of your airplane, so that if you ever have an engine out emergency, it can run thousands of simulations in an instant and immediately guide you on the safest path to a nearby airport, using winds aloft to fine-tune the power-off guidance if you have an ADS-B receiver.
On a commercial flight in visual conditions, an iPad was used to navigate after a half million dollar glass cockpit system went out. What if it had happened in IFR conditions? A map would not have gotten them out of that one—but Xavion would have.
About the instrument simulations and synthetic vision
Reading from your iPhone or iPad’s internal sensors, Xavion figures out your current location and attitude. Based on GPS signals, it also displays a ground-track, ground-speed, altitude, and vertical speed.
From this data, Xavion gives you a primitive backup of the entire six-pack panel. This includes:
- airspeed indicator (minus any wind effects, since it knows only your ground speed),
- artificial horizon (based on the iPads’ internal gyros, accelerometers, and GPS if available),
- altimeter (minus any barometric pressure effects, since it is based on GPS),
- slip indicator (based on the the iPads’ internal accelerometers—just as good as a real “ball”),
- heading indicator (minus any wind effects, since it knows only your ground track), and
- vertical speed indicator (minus any barometric pressure effects, since it is based on GPS).
Should one of these instruments in your airplane fail in flight, Xavion will give you at least an approximate backup based on the iPad’s internal sensors.
If the GPS receiver loses signal in flight, Xavion will continue to use the iPad’s internal gyros and accelerometers to give at least an approximation of bank angle. In our experience, although some accuracy will be lost, the horizon will still be accurate to within five degrees in pitch and 10 degrees in roll even after moderate maneuvering.
As well as the standard displays above, Xavion shows gliding range as the illuminated area on the map, so you can see at-a-glance where you can get, power-off.
Navigation
Since Xavion interfaces with a GPS, you can get powerful point-to-point navigation. Just follow the easy-to-fly “hoops” that Xavion draws to get you where you’re going.
Furthermore, in the event of GPS signal loss, Xavion goes into a deduced-reckoning mode. It will check the iPad’s internal gyros to see how much your heading has changed since the GPS signal was lost and update the approximate path accordingly. The accuracy of this estimate degrades over time, but if you keep turns and hasty maneuvering to a minimum, you can still get in the general vicinity of an airport quite a long time after GPS signal loss.
The Gravity Engine: Engine-out guidance to the safest nearby runway
No matter what happens to the engine that you paid for in your airplane, GRAVITY will always work. Simply lower the nose a hair to get best glide speed, and gravity will keep you going! If you fly at a safe altitude, then all you need to USE this gravity engine with 100% success is GUIDANCE! And Xavion comes as close as it can to providing that guidance.
In a normal flight, you can pull your plane’s power to idle and have Xavion learn your plane’s glide ratio. From then on, Xavion will color its moving map according to how far you could successfully glide at this moment if your engine were to fail. This way, you can tell at glance exactly what airports you would be able to reach (or not!) in the event of an engine failure.
Furthermore, Xavion is constantly running engine-out flight simulations behind-the-scenes as you fly. The app imagines an engine failure every single second, and it checks how your plane would do in a power-off glides to every runway at every airport in gliding range.
For each of these simulated engine failures, Xavion estimates the likelihood of a successful landing based on the runway’s length, width, proximity to the aircraft, and glide path from your current location down to the threshold of that runway. When Xavion has found the runway that it believes is most likely to result in a safe engine-out landing, it builds a series of hoops from your current location to that runway—spiraling, circling, or extending as needed in order for the hoops to follow a constant descent angle that your airplane should be able to sustain without power.
That descent angle will be somewhat steeper than the optimal glide for your airplane, so if wind is strong or there are other unknowns, you have a margin of safety built into your descent. You should use flaps, gear, speedbrakes, or s-turning to hold the desired path to the runway, since the path will be designed to be steeper than optimal glide to give you that margin of safety. (This is how gliders, including the Space Shuttle, fly pre-planned power-off approaches!)
Understanding the approach is easy: all you see on the synthetic vision system is a series of hoops sprouting out of the nose of your airplane and running through the sky, spiraling down to the best runway to land at if the engine fails. No guessing what to do at airport arrival, since the hoops take you right to the runway threshold at speed, heading, and altitude for a normal power-off landing.
In other words, Xavion designs the safest instrument approach it can, so you can safely land at a runway in the event of power loss. It shows you that approach as a series of hoops for you to glide through.
Xavion even does all this at night, or in IMC conditions!
Showing Wake Turbulence
Here’s a recent blog-entry I made that pretty much lays it out:
I was recently flying along at 16,500 in N844X coming out of a pretty major airport and an MD-80 sailed silently off my right side, opposite direction. He was about a half mile away, maybe 500 feet above me, obviously inbound to the airport I had just left. I enjoyed the silent view as he glided by and then got back to my usual scan.
About 2 minutes went by.
Then, suddenly: BANG!!!! N844X suddenly slammed be down into the seat with about 2 or 3 G’s of force, then slammed me up into the roof at negative G, then slammed me down into the seat again at 2 or 3 G’s.
Then continued as if nothing had happened.
It all happened in about ONE SECOND… NO POSSIBLE way to even think about reacting to it in any way at all.
I just sat there in the seat, amazed, my headset knocked into my lap, wondering if the plane was still structurally intact. When the adrenaline wore off, I started to feel a steady aching in my neck from being thrown into the cockpit ceiling.
So here’s what happened: When I SAW the MD-80, he was drifting along harmlessly BESIDE ME (opposite direction). BUT, unknown to me at the time, he must have CROSSED IN FRONT OF ME a few minutes earlier.
There was no way anyone could notice someone crossing their path while still several minutes ahead, so there is no way that I or anyone else could have seen this coming. The exact same thing would have happened to anyone. ATC never calls out that a plane has crossed the path that you will reach in several minutes. Perhaps for this reason, wake turbulence is referred to as a ‘one-in-a-million’ event… but it isn’t. I got hit hard with only about 2,500 hours of experience, and wake turbulence is not random. It is completely predictable.
And now Xavion shows it to you.
Here’s how:
As I was thinking about that encounter the next day, my neck still aching form the impact, a way to track wake turbulence with an iPad dawned on me: Wake turbulence always emits from airplanes. And thanks to ADS-B, we know where the airplanes are. The next step is obvious.
So now, starting with Xavion 1.83, if you have an ADS-B receiver, then Xavion will, as always, track the location and altitude of all other airplanes. But now: Every 10 seconds, each of those airplanes “lays a little wake turbulence egg”, simply depositing it into the sky. Over the next 4 minutes, those little wake turbulence “eggs” will sink at the sink rate that wake turbulence is known to sink at, and as well move with the wind, as wake turbulence does. (the wind, as well, comes from the nearest ADS-B weather report)
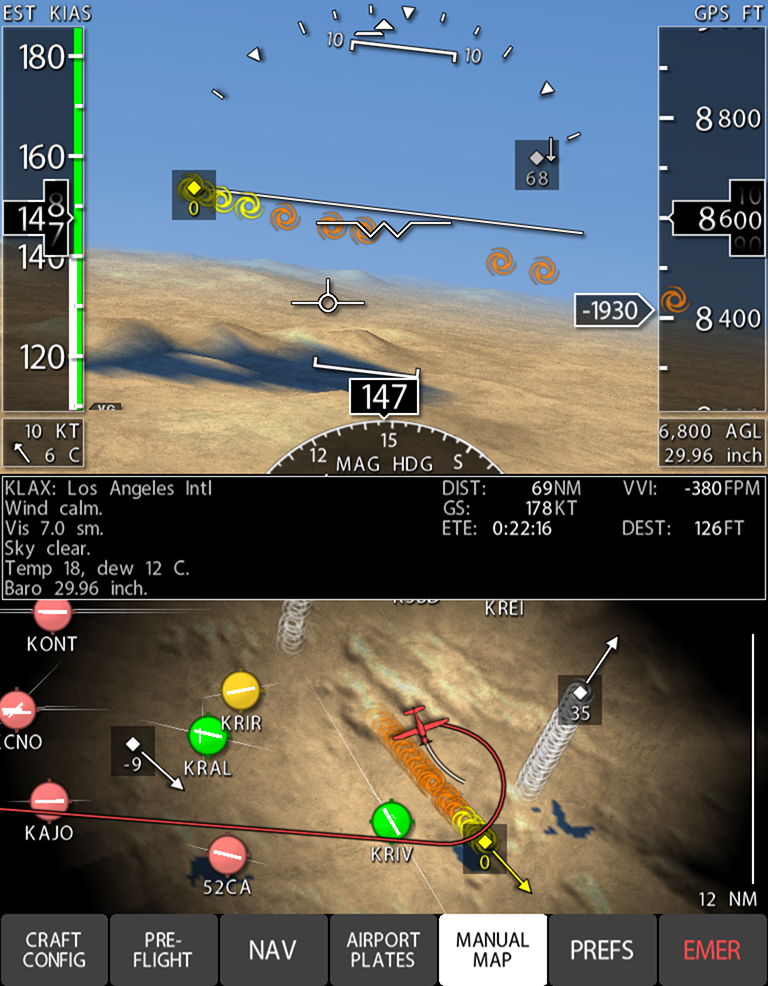
Each wake turbulence “egg” is plotted as a little rotating cyclone, both on the MAP (with altitude difference from you displayed, just like traffic) and on the PFD, so you can clearly see it on your PFD. As well, the COLOR of the wake turbulence eggs is handled exactly like the color of TRAFFIC icons, going from white to yellow to orange to red as it gets closer to you in separation and altitude.
After 4 minutes, each little wake-turbulence “egg” is dissipated, and disappears from Xavion.
So, when people talk about wake turbulence detection with doppler radar and complicated things like that, they seem to have forgotten the obvious: Wake turbulence is laid by airplanes, descends at a known descent rate, and drifts with the wind… and we know where the airplanes are, so tracking wake turbulence is actually shockingly easy” Just pop them out of the airplanes and move them with the laws of physics.
So why doesn’t EVERYONE do it??
Well, we have it now.
Checking your takeoff distance
Each time you take off, Xavion remembers the distance you took to get to 50 feet above the ground. Notice that Xavion does not consult a handbook to see what a test pilot did to take off in a new airplane. Instead, it observes the takeoffs that you execute in your airplane, and memorizes the the altitude (from the GPS) and weight (which you enter for your weight and balance check) for each takeoff.
Then, every time you line up on a runway, Xavion looks at the runway (using its runway database and the iPad’s GPS) and compares the runway length that you have in front of you to the takeoff distance you have actually used in the past. It takes into account your altitude and aircraft weight, and it gives an annunciator indicating what percentage of the runway it thinks you are likely to use!
If the runway in front of you is short compared to what you typically use, the runway distance annunciator will go red, indicating that the runway is just barely long enough (or too short!) for you to take off at your current weight and altitude.
Weight & balance and other copilot functions
Xavion can also run weight and balance checks for you. Just enter the fuel on board, as well as the weight in the various seats in the plane. Then, Xavion will show you a weight and balance envelope with a line showing your current weight and balance, so you can confirm legality with only a few swipes.
Xavion checks your currency, too—just enter the date of your last medical, BFR, or IPC and Xavion will show you your flight currency.
To estimate your fuel burn and flight time, just enter the 4-letter identifier for your destination airport. Xavion will give you estimates at a number of altitudes, allowing you to choose the best altitude to fly.
So, by entering just a few bits of data each time you fly, Xavion will check your currency, weight, balance, and predicted time and fuel burns for the upcoming flight. After just a few swipes on your iPad, you’ll be nearly ready for a ramp-check!
People have been asking how fast their airplane is for a long time. Isn’t it time to ask how smart it is? Xavion tries to answer that question.








How Xavion’s Engine-Out Guidance Works
So the Space Shuttle is over Japan after the de-orbit burn and the next stop is Florida.
Do the astronauts say: “Oh no! We are out of gas! Let’s go to best glide speed and just hope things work out for the best when we are over Florida!”?
That’s what your instructor sure has you doing when you lose an engine… he just says “Go for best glide to the nearest airport!”.
So what did the astronauts do differently?
The answer: They had a PLAN. They knew the BEST glide the shuttle could give, and the WORST glide the shuttle could give, and their planned approach took them right down the middle BETWEEN the two. That way, if things worked out differently than planned, they could go to a better (or worse) glide to stay right on their nominal target. In fact, in the cockpit, they came down the middle of a CONE from Japan to Florida. The HIGH side of the cone was the steepest they could come in (worst glide) and the LOW side of the cone was the shallowest they could come in (best glide). They aimed for the middle of the cone every time!
So, you see, they did NOT come in at BEST glide… they came in at halfway between best glide and worst glide, so they could raise or lower the nose or use more or less speedbrakes or s-turn more or less to stay right in between the best and worst glide scenarios.
Now, with Xavion, you can do the same thing.
So, what is “best glide” and what is “worst glide”?
Here are the definitions I have found through the development of Xavion.
“Best glide”, for the purposes of this manual, is the speed at which the craft glides the farthest for each foot of descent, with the flaps, speedbrakes, and gear all retracted, and the propeller and cowl flaps set in the CRUISE configuration if they are controllable. In other words, “Best glide” is the speed at which you can glide the farthest in the cruise configuration. Feathering the prop, closing the cowl flaps, and tossing suitcases overboard ( ;-P ) may improve the glide ratio, further, and if you fall below the planned approach then Xavion may suggest you do some of those things, but any benefit you get from those actions is not factored into Xavion’s plan for your approach, which uses best glide speed in CRUISE configuration as its best-case plan.
“Worst glide””, for the purposes of this manual, is lowering the flaps all the way down, and pushing the nose over until you go right up to your maximum flap extension speed. With the flaps all the way down, and the nose pushed over to flap extension speed, this is the WORST glide that Xavion will expect. Of course, redlining the prop, dropping the gear, opening the cowl flaps, popping the speedbrakes, slipping the airplane, and spiraling in a steep bank will all increase the descent rate, but as far as Xavion is concerned, just dropping the flaps and pushing the nose over to th max flap extension speed is the worst glide it will expect from you.
So, now you know what Xavion thinks is your best glide and your worst glide. As part of the setup, Xavion will learn the best glide and worst glide for your airplane, and then when it builds the best approach that it can think of for you, that approach will be right between best and worst glide!!! This way, even if the winds or aircraft drag are different than planned, you can simply retract or extend the flaps a bit to increase or decrease drag to stay right in the middle of the imaginary cone to the runway. In other words, with Xavion, you are flying a PLAN clear down to landing, and that plan is right between the best and worst glide that your airplane can deliver, so even if things do not go exactly as expected, there is margin either way. You see, Xavion PLANS your approach at a speed halfway between best glide speed and max flap extension speed, and at a descent angle halfway between best-glide-while-clean and max-flap-extended-speed-while-dirty, so if you ever start to go above or below the planned path, you can simply adjust your speed and flaps to get back on the planned path. (As well, you can feather the prop, extend speedbrakes, lower the gear, or anything else you like to get up or down to the planned path, but Xavion only counts on flaps and speed control when planning your approach).
As well, Xavion does NOT always go for the CLOSEST airport, but instead goes for the longest, widest runway that it can reach.
Now, this is completely different than what your flight instructor told you, which was simply “Go to the nearest airport.”
So, WHY does Xavion perform so differently than your flight instructor?
The answer is that your flight instructor could not always know exactly what airports were in gliding range, or how comfortably he could make those airports without power. As a result, he always chose the CLOSEST airport (even if a much better runway was just a bit farther away, but still easily within range) and he always flew there at best glide speed. Doing so exposed the possibility, however, that he would arrive at the airport too high to land, and too low to circle. So your instructor could not know what airports he could reach, or with how much margin he could reach them, so he would always simply go for the closest airport (even if it was not the BEST airport!) and go for best glide (even if that would not put him on the proper approach angle for the runway!!!) simply because he did not have the data or time to do any better than that.
This, of course, is where computers are different. Xavion knows your location and altitude, the airport’s location and altitude, and the glide ratio of the airplane… so it sets up the nominal glide (halfway between best and worst glide) to the best airport within range at nominal glide, and guides you all the way there by simply presenting you with hoops to fly through. THIS is the plan that your instructor never had the ability to make, and the plan that NASA carefully made for the Space Shuttle over a period of months… and the plan that Xavion makes for you… every single second.
Finally, Xavion does NOT aim for the threshold of the runway!!! Your instructor probably told you to aim for the threshold of the runway when landing.
But he was WRONG to do so.
Why?
Well, let’s look at an Olympic archer shooting arrows at a target. A simple question: If he plays to win, then where does he aim? For the MIDDLE of the target or for the EDGE of it?
And this is why Xavion does not aim for the threshold (the EDGE!) of the runway. Instead, Xavion estimates your landing distance (based on your stall speeds) and attempts to set up an approach WHERE THE DISTANCE FROM THE NEAR END OF THE RUNWAY TO YOUR TOUCHDOWN IS EQUAL TO THE DISTANCE FROM THE FAR END OF THE RUNWAY TO YOUR STOPPING-POINT! In other words, Xavion does something that NOBODY DOES, but EVERYONE SHOULD: It uses the MIDDLE of the runway! This way, there is maximum room for error on either end. The approach is set up to maximize the room for error between near-threshold and touchdown, AND far-threshold and rollout. Your instructor always taught you to aim for the threshold, and this always resulted in a minimum amount of room between the runway threshold and your touch-down, while often leaving a TREMENDOUS amount of unused runway beyond your rollout point. This is not as safe as you want for the engine-out case, because IT LEAVES ALMOST NO MARGIN IF YOU COME UP SHORT. For this reason, Xavion does what all of us should do, which is aim for the MIDDLE of the runway to maximize our margin for error of we com up short or long.
So to summarize this as tightly as possible:
In the past, we never had a plan for engine failures. Xavion constantly provides us with a plan.
In the past, we always went to best glide for the nearest airport, leaving us no margin at all to handle un-expected wind or thermal or aircraft performance, and no idea if the CLOSEST airport was really the BEST one. Xavion takes us at a NOMINAL glide to the BEST airport, with the ability to modulate flaps or speed to MAINTAIN THAT PLAN all the way to touchdown.
In the past, we always aimed for the (near) EDGE of the runway, leaving us almost no margin if we came up short! Xavion aims the length of our rollout for the MIDDLE of the runway to maximize our safety even if things do not go exactly as planned and we wind up short or long.
THIS is the way we SHOULD fly, and since Xavion can visualize, plan, and display ALL of it, now we CAN. THIS is an app that lets me fly single-engine at night.